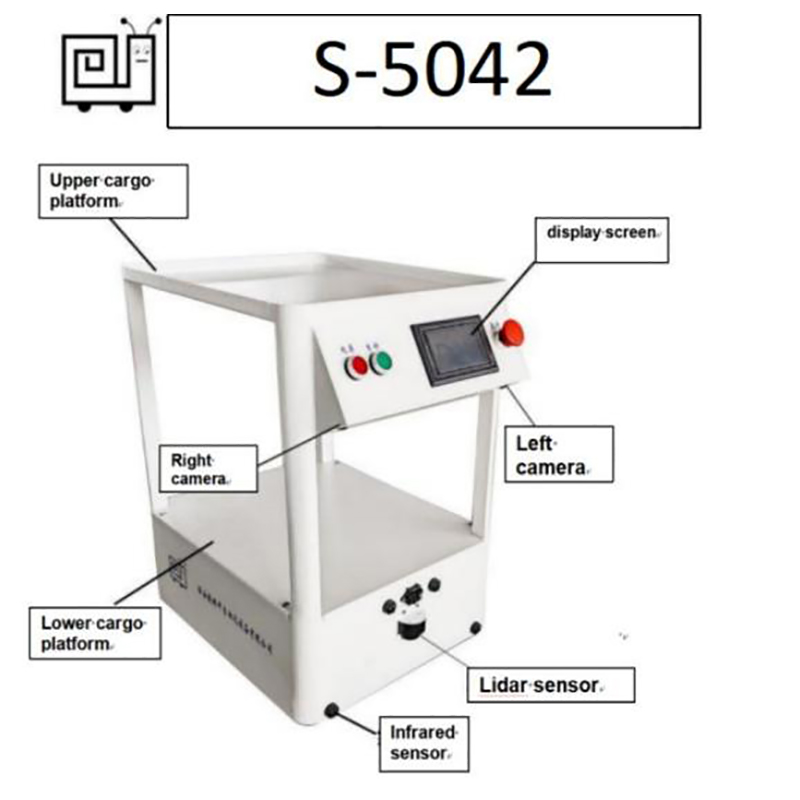
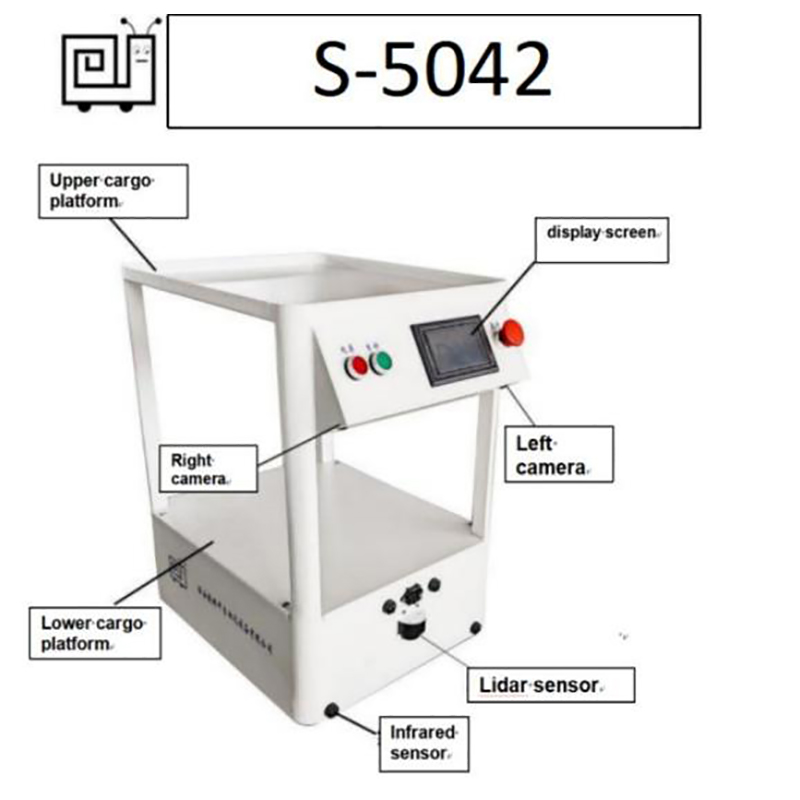
AGV Automated Guided Vehicles mini AGV paylaod for 50KG S-5042 AGV


| S-5042 AGV Parameters | ||
| Serialnumber | project | Basic parameters |
| one | deadweight | 26KG |
| two | maximum payload | 50KG |
| three | External dimensions | L500mm*W420mm*H650mm |
| four | Load platform | L500mm*W420mm |
| five | Driving speed | 0.25-1.0m/s |
| six | Obstacle avoidance distance | 0.3-0.5m |
| seven | Avoidance angle | one hundred and forty |
| eight | Minimum turning diameter | 110cm |
| nine | Minimum station spacing | 20cm |
| ten | Patrol mode | Black macula horse line, pure yellow line |
| eleven | Turning method | 90 degree right angle |
| twelve | Walking function | Forward, right angle turn, pause, permanent stop |
| thirteen | Navigation method | Visual guidance |
| fourteen | Number of sites | 9+9 |
| fifteen | Rated voltage of battery | DC24V |
| sixteen | Battery capacity | 20AH |
| seventeen | Charging time | 8 hours |
| eighteen | Charging method | Manual charging |
| nineteen | working hours | 18 hours |
| twenty | safety protection | Laser obstacle avoidance |
| twenty- one | Usage environment | Indoor flat ground |
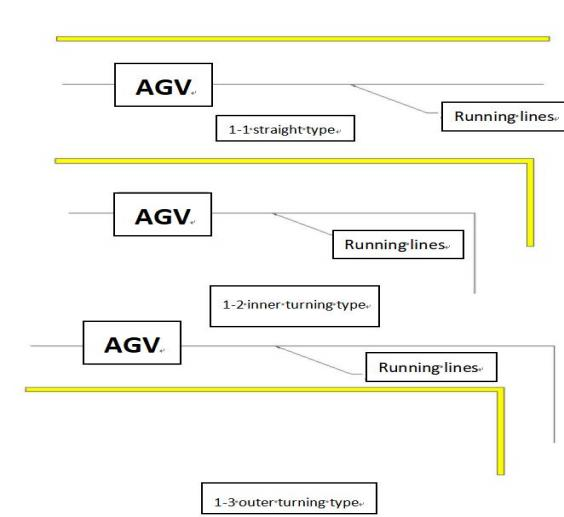
1. Route planning
Choose a suitable route for planning based on the usage of the AGV, stopping stations, and the transportation of goods. Path planning follows the principle of "horizontal and vertical". As shown in Figure 1-1, straight line type, 1-2 inner turning type, 1-3 outer turning type.