Humanoid hand for robot

(1)High precision, high flexibility, imitation human hand design robot dexterous hand ROHand



High precision: built-in PID motor control algorithm, capable of achieving ±1mm positioning accuracy to ensure operation accuracy
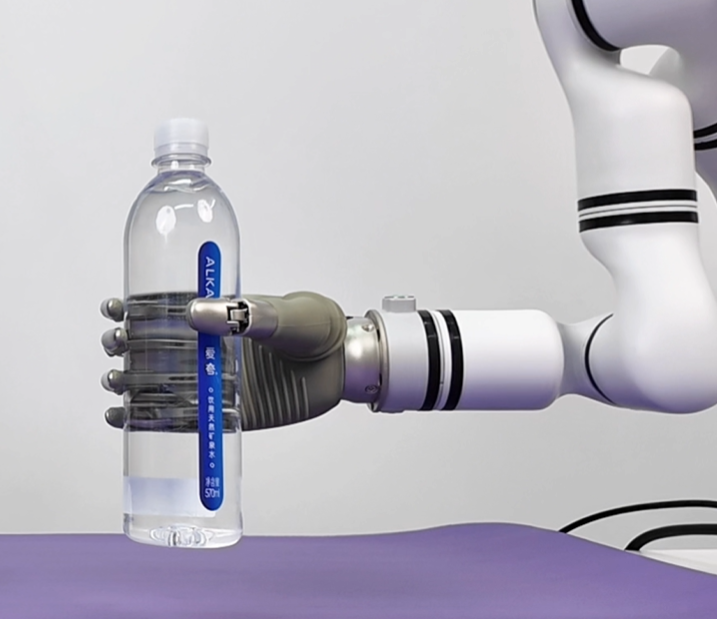
High flexibility: The dexterous hand ROHand has 6 active degrees of freedom, which can simulate human hands to achieve a variety of gestures, such as pinching, grasping, etc.
Typical applications: humanoid robots, robot end effectors, inspection robots, intelligent bionic prosthetics, education and scientific research equipment, etc
Human hand design: infinitely close to the size and proportion of human hands
Lightweight materials: Use aluminum alloy and zinc alloy materials to reduce the overall weight
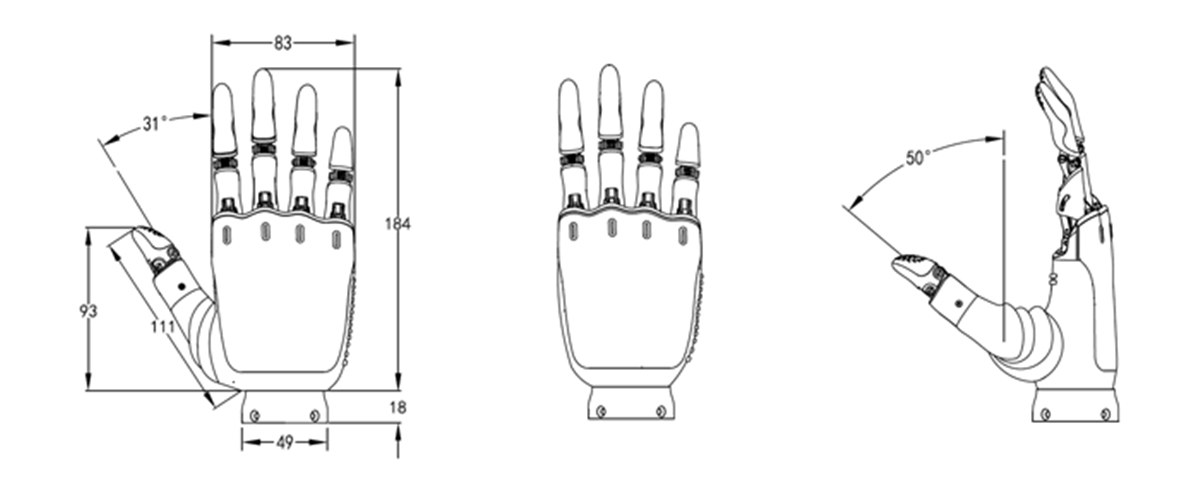
● From the tip of the middle finger to the bottom of the hand: 184mm
● Tip of thumb to bottom of hand: 93mm
● Additional support: SDK/ROS/ROS2/URDF
● Maximum opening time: ≤1.0 seconds
● Maximum shutdown time: ≤1.0 seconds\
●Maximum fingertip force of one finger: ≥4.41N
● Maximum thumb tip force: ≥9.8N
Communication compatible:
● Communication interface: UART/RS485/CAN
● Communication protocol: ModBus-RTU serial control protocol/CAN
● Additional support: SDK/ROS/ROS2/URDF

Humanoid robot, robot end effector, inspection robot, intelligent bionic prosthesis, educational and scientific research equipment, etc

●Material: zinc alloy, aluminum alloy
● Degrees of freedom: 11 moving joints, 6 active degrees of freedom
● Repeat positioning accuracy: ±1mm
Dimensions parameters:
● From the tip of the middle finger to the bottom of the hand: 184mm
● Tip of thumb to bottom of hand: 93mm
● Thumb length: 111mm
● Palm width: 83mm
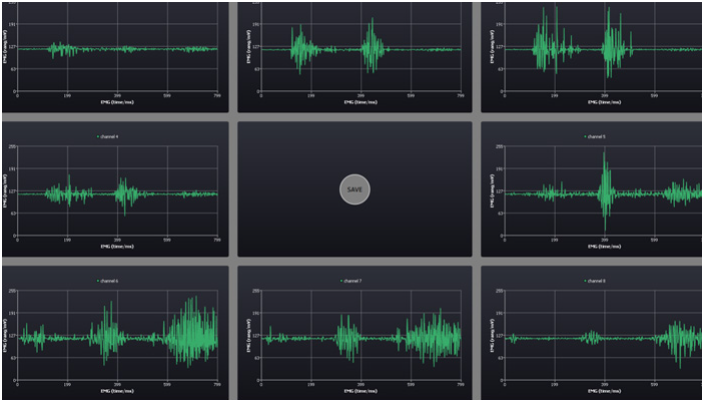
● Support 2-8 EMG sensors
● Support 500Hz~1KHz sampling rate
● 8-BPP sample resolution
● Upto 18 user selectable grips